

CARACTÉRISTIQUES TECHNIQUES
- Afficheur :
4 chiffres à 7 segments (9999 / 23:59 / 59’.59»)
- Vitesse maximale de comptage :
200 impulsions / s (avec antirebond court)
2 impulsions / s (avec antirebond long)
- Amplitude du signal d’entrée :
3 à 12 Vpp
- Tension et courant de sortie :
5 VDC 50 mA maximum
- Alimentation :
9 à 12 VDC ou 2 x 9 VAC 300 mA
- Consommation :
150 mA
- Dimensions :
134 x 76 mm.
Compter en avant ou à rebours, avec des impulsions externes ou en utilisant l’horloge interne, manuellement ou automatiquement : ce circuit fait tout cela et bien d’autres choses ! On pourra l’utiliser pour compter des objets (par exemple entraînés par un tapis roulant) ou des personnes (marchant sur des contacts de sol, type pédalier, ou actionnant un tourniquet) franchissant un seuil, mais aussi pour mesurer le temps écoulé à partir d’un certain instant. C’est un microcontrôleur qui permet tout cela : il peut augmenter une unité numérique au gré des impulsions parvenant à une entrée. De manière générale, un compteur est un ensemble de FLIP-FLOP type D montés en cascade (chacun constituant un étage) ; les sorties expriment le résultat du comptage en binaire et une série de portes logiques le convertit en décimal. Le micro est un PIC16C57 déjà programmé en usine pour servir de compteur à tout faire : avec son architecture à huit bits, il peut faire beaucoup ; aussi avons-nous choisi de l’exploiter à fond et, non contents de le faire compter en avant et en arrière, nous le faisons fonctionner comme horloge (heures:minutes) et comme “timer” (minutes:secondes), grâce à un temporisateur interne à oscillateur à quartz de 4,1943 MHz. Le temps réglé étant écoulé, une sortie se déclenche. L’avancement du comptage est visualisé sur quatre afficheurs à sept segments.
Le schéma électrique
Voyons, en regardant le schéma électrique de la figure 1, les principales caractéristiques et le fonctionnement de ce compteur multifonction. Plusieurs blocs fonctionnels apparaissent : microcontrôleur, interface d’entrée, interface de sortie et affichage. Le premier est bien sûr le plus important car il coordonne les autres et reçoit les signaux lui parvenant de l’extérieur à travers l’interface d’entrée, le dip-switch à quatre microinterrupteurs et les poussoirs. Après le “power-on-reset” (mise sous tension et initialisation), le programme initialise les lignes d’E / S et paramètre celles du registre RC comme sortie de commande des afficheurs à 7 segments (sept bits servent pour les segments et un, RC1, gère les points décimaux) ; les quatre derniers de RB (RB4 à RB7) comme entrées lisant l’état des quatre poussoirs, chacune étant maintenue au niveau logique haut par une résistance de “pull-up” de 10 k. RB0 aussi est une entrée, utilisée pour lire l’état des quatre micro-interrupteurs du dip-switch grâce à une astuce utilisant les lignes de commande d’anodes communes des afficheurs à LED, soit RA0 à RA3 (nous en reparlerons plus loin).
Pour l’instant, contentons-nous de savoir qu’elles sont toutes initialisées comme sorties actives au zéro logique.
RB1 et RB2 sont des entrées que le PIC utilise pour lire les impulsions à compter, respectivement en avant et en arrière (à rebours) : chaque impulsion de tension appliquée à la broche 9 du connecteur SK1 détermine l’avancement d’une unité du comptage ; inversement, chaque impulsion fournie à la broche 8 produit un décompte d’une unité. Enfin, RB3 est initialisée comme sortie activant, en mode “timer”, une sortie, justement, au niveau TTL (broche 5 de SK1) quand le comptage a atteint la valeur réglée par l’usager au moyen des poussoirs.
Le deuxième, non moins important, car il donne toutes les signalisations que l’on attend, est l’afficheur à quatre chiffres (quatre afficheurs à 7 segments à LED), commandé en multiplex et mis à jour en temps réel suite à la réception d’une impulsion sur une entrée de comptage avant / arrière (utilisation comme compteur) ou à la pression d’un des poussoirs quand on effectue un paramétrage et enfin automatiquement en utilisations “timer” et horloge.
Pour économiser des lignes de commande, le micro gère la visualisation en produisant les niveaux logiques bas nécessaires à l’allumage des segments des chiffres, en parfait synchronisme avec l’alimentation des anodes communes des afficheurs intéressés ; ainsi, chaque chiffre est visualisé tour à tour, mais le processus est si rapide que la rémanence rétinienne permet de voir parfaitement un nombre de plusieurs chiffres comme si tous les chiffres qui le composent étaient allumés ensemble.
Quant au point décimal, il va de soi qu’il ne s’allume que si on se sert de l’appareil comme “timer” décimal ou sexagésimal (horloge) ; dans ce cas la routine de gestion de l’afficheur, quand elle pilote DY2, alimente aussi la ligne dp et allume, en plus du chiffre, le point inférieur droit permettant de séparer le deuxième et le troisième chiffre afin de visualiser heure et minute ou bien minute et seconde.
Avant de voir les fonctions que l’appareil est capable de remplir, disons un mot sur la lecture des quatre microinterrupteurs du dip-switch : comme nous ne disposons pas d’assez de lignes d’E / S, nous lisons l’état de SW5 en utilisant celles du multiplexage des anodes communes. Plus exactement, les mint1 à mint4 (voir figure 4) sont analysés en lisant la condition de l’entrée RB0 (normalement au niveau logique haut grâce à la résistance de “pull-up” R13) durant chaque balayage de T1 à T4 : par exemple, si en correspondance de l’activation de RA3, RB0 est trouvé au zéro logique (0,6 V à cause des diodes en série), c’est que le mint4 est fermé ; si en revanche on lit la condition 1, le micro-interrupteur (mint) est ouvert et la broche 10 du micro lit le 5 V dû à la “pull-up” R13.
Les poussoirs sont lus, eux, avec RB4, RB5, RB6 et RB7, lesquelles se trouvent normalement au niveau logique haut : quand un poussoir est pressé, la broche correspondante du PIC est mise au niveau logique 0. Quant aux entrées de comptage (broches 8/9 de SK1), elles servent seulement si le circuit est utilisé comme compteur et toutes deux utilisent leur propre interface de tension à transistor ; si on applique à la broche 9 un potentiel de 3 V positif par rapport à la masse, R14 et R15 en pont avec R18, achemine le courant à la base de T6 avec une intensité suffisante pour le saturer ; son collecteur, normalement à +5 V, est à presque 0 V, ce qui met la broche 11 du micro à l’état logique bas. Il ne reste plus qu’à déclencher le compteur en le faisant avancer d’une unité.
Notez que l’interface peut recevoir des impulsions de tension d’amplitude comprise entre 3 et 12 V, car au-delà de 4,7 V ZD1 intervient pour limiter le potentiel en amont de R15 (R14 limite alors le courant dans la zener).
La section comportant T7 fonctionne exactement de la même façon que la précédente (elles sont presque identiques), sauf que les impulsions appliquées entre le point 8 et la masse sont envoyées à l’entrée RB2 du micro et déterminent chacune le décompte de l’état du compteur. Comme on va le voir, les deux entrées peuvent être utilisées couplées avec l’oscillateur interne pour l’utilisation en mode “timer”, soit le comptage automatique en avant ou à rebours.
Que l’on prévoie de commander les entrées avec des poussoirs, pédaliers ou micro-interrupteurs à levier (voir figure 5), le programme résident du PIC intègre une routine de lecture avec antirebond, c’est-à-dire capable d’éviter une fausse lecture due à une fermeture multiple des contacts (à cause de contacts mécaniques imprécis ou d’une coupure de faisceau lumineux non franche) dans un délai limité (grâce à l’antirebond les fermetures multiples sont interprétées comme une seule fermeture).
Pour rendre encore plus universel l’emploi de l’appareil, nous proposons au choix deux valeurs d’intervalle antirebond (4 et 400 ms) sélectionnable au moyen de mint3, comme le montre la figure 4. En mode “timer”, quand la valeur réglée est atteinte, le micro active la sortie correspondant à T5 et maintient sa ligne RB3 (normalement à 5 V) à la masse. Ainsi, le collecteur du transistor achemine le courant dans le dipôle LD1 / R28, ce qui allume la LED et également à R27, ce qui met ses extrémités à 5 V ; il est donc possible d’alimenter avec le 5 V présent sur la broche 5 de SK1 l’entrée d’un dispositif logique ou l’enroulement d’un relais 5 V, ce que nous avons prévu en insérant la D7 de protection de T5.
L’appareil est alimenté en continu ou en alternatif : en série dans la ligne positive, nous avons en effet monté deux diodes redresseuses D1 et D2, avec chaque cathode reliée au positif d’un condensateur C8. La tension continue d’alimentation, entre 9 et 12 V, s’applique entre une des anodes et la masse (le + à la broche 2 ou 3 et le – indifféremment à la broche 1, 4, 6, 10 de SK1) ; si l’on veut on peut aussi bien alimenter le circuit en alternatif, à partir du secondaire à prise centrale 9+9 VAC d’un transformateur secteur 230 V (relier la prise centrale à la masse et les extrémités à l’anode de D1 et à celle de D2) : les demi ondes redressées par chaque diode seront alors appliquées aux extrémités de C4 et C8, ce qui produit des impulsions sinusoïdales de fréquence double, soit 100 Hz, ensuite lissées par les condensateurs qui en tirent un potentiel continu que le régulateur VR1 stabilise à 5 V.
Une fois alimenté, le micro lance l’autotest, durant lequel aucun poussoir ne doit être pressé ni aucun micro-interrupteur actionné (les entrées doivent être au repos).
Après le test, l’afficheur visualise, à la suite, le déroulement du programme (au format rx.xx), l’indication tESt (indiquant qu’il est en auto-test) et, enfin, GOOD, mais seulement si tout va bien (dans le cas contraire, un code d’erreur s’affiche, comme le montre la figure 6).
Pourquoi le micro trouve-t-il anormal qu’un poussoir soit pressé ou qu’une entrée soit active pendant l’autotest initial ? Eh bien, si RB1 et RB2 sont au niveau logique 0 sans alimentation des entrées, cela veut dire que le circuit n’a pas été monté correctement ou bien qu’un des transistors est en court-circuit collecteur-émetteur ; de même, si une ou plusieurs des RB4 à RB7 est au niveau logique bas quand aucun poussoir n’est pressé, c’est qu’un court-circuit rend inutilisable le poussoir correspondant.
 Figure 1 : Schéma électrique du compteur multifonction à 4 chiffres.
Figure 1 : Schéma électrique du compteur multifonction à 4 chiffres.Les fonctions du compteur (comptage manuel, automatique, horloge) sont définies par le dip-switch SW5. En manuel et en automatique, l’avancement dépend du niveau des entrées (contacts 8 et 9) et le paramétrage par l’usager se fait à l’aide des poussoirs. N’oubliez pas qu’à partir de l’alimentation du circuit et jusqu’à ce que l’afficheur visualise le message GOOD, les entrées de comptage ne doivent être soumise à aucune tension et les quatre poussoirs de paramétrage (SET/RUN, UP, DOWN, RESET, ainsi que S4, S3, S2, S1) doivent rester au repos ; dans le cas contraire l’appareil affiche un message d’erreur.
 Figure 2a : Schéma d’implantation des composants du compteur multifonction à 4 chiffres.
Figure 2a : Schéma d’implantation des composants du compteur multifonction à 4 chiffres. Figure 2b : Dessin, à l’échelle 1, du circuit imprimé du compteur multifonction à 4 chiffres.
Figure 2b : Dessin, à l’échelle 1, du circuit imprimé du compteur multifonction à 4 chiffres. Figure 3 : Photo d’un des prototypes de la platine du compteur multifonction à 4 chiffres.
Figure 3 : Photo d’un des prototypes de la platine du compteur multifonction à 4 chiffres.Liste des composants
R1 ..... 150
R2 ..... 150
R3 ..... 150
R4 ..... 150
R5 ..... 150
R6 ..... 150
R7 ..... 150
R8 ..... 150
R9 ..... 10 k
R10 .... 10 k
R11 .... 10 k
R12 .... 10 k
R13 .... 10 k
R14 .... 2,2 k
R15 .... 2,2 k
R16 .... 2,2 k
R17 .... 2,2 k
R18 .... 4,7 k
R19 .... 4,7 k
R20 .... 10 k
[…]
R27 .... 10 k
R28 .... 390
C1 ..... 18 pF céramique
C2 ..... 18 pF céramique
C3 ..... 100 nF multicouche
C4 ..... 100 nF multicouche
C5 ..... 100 nF multicouche
C6 ..... 1 nF céramique
C7 ..... 1 nF céramique
C8 ......470 μF 25 Vts électrolytique
C9 ..... 10 μF 35 Vts électrolytique
D1 ..... 1N4007
D2 ..... 1N4007
D3 ..... 1N4148
[…]
D7 ..... 1N4148
ZD1 .... zener 4,7 V 1/2 W
ZD2 .... zener 4,7 V 1/2 W
LD1 .... LED 3 mm rouge
DY1 .... afficheur à sept segments 10 x 13 anode commune
[…]
DY4 .... afficheur à sept segments 10 x 13 anode commune
T1 ..... BC557
[…]
T5 ..... BC557
T6 ..... BC547
T7 ..... BC547
VR1 .... 7805
IC1 .... PIC16C57-EK8035
SW1 .... poussoir plat pour ci
[…]
SW4 .... poussoirs plat pour ci
SW5 .... dip-switch 90° à 4 micro-interrupteurs
X1 ..... quartz 4,1943 MHz
Divers :
4 supports 2 x 7
1 support 2 x 14 pas double
1 boulon 3MA 8 mm
1 barrette mâle 10 pôles horizontale
1 connecteur femelle 10 pôles avec câble 20 cm
Sauf spécification contraire, toutes les résistances sont des 1/4 W à 5 %.
Un appareil, beaucoup de fonctions
Voyons ce que peut faire ce circuit et comment le paramétrer. Il peut servir de compteur UP/DOWN à commande externe, mais aussi de compteur automatique pour réaliser un “timer” ou une horloge.
La fonction de base s’obtient simplement en alimentant l’appareil et en appliquant à l’une des entrées UP ou DOWN les impulsions de tension à compter, ou bien des interrupteurs reliés d’un côté à l’alimentation positive et de l’autre aux points 8 ou 9 de SK1.
Avant de procéder au comptage, il faut presser pendant au moins une seconde la touche de “reset” SW4 afin de réinitialiser l’afficheur et le micro. Si l’on veut que le compteur parte d’une valeur précise, avec les poussoirs SW2 et SW3 on peut, respectivement, augmenter ou diminuer d’une unité à la fois la valeur numérique visualisée par l’afficheur.
En mode compteur, il est possible d’afficher un nombre et de faire que lorsqu’il est atteint la sortie soit activée.
Pour cela, avant de procéder au comptage, il faut réinitialiser le circuit en pressant SW4 puis presser SW1 jusqu’à l’affichage du mot Set. Alors, avec SW2 et SW3, réglez la valeur à atteindre (SW2 augmente, SW3 diminue).
Quand l’afficheur indique la valeur désirée, pressez à nouveau SW1 pour mémoriser la valeur. Quand le mot Run s’affiche, le compteur est prêt à commencer le comptage. En dehors du comptage des impulsions provenant de dispositifs externes, l’appareil peut aussi fonctionner en automatique : dans ce cas il suffit d’activer le “timer” interne (mint4 fermé, comme le montre la figure 4) ; à ce moment, si on alimente l’entrée correspondant à la broche 9 de SK1, l’afficheur avance d’une unité par seconde ; si on applique un potentiel à la broche 8, il décompte d’une unité par seconde.
En base décimale l’appareil fonctionne en mode compteur de secondes jusqu’à 9999 ou de cette valeur jusqu’à 0. Si on ferme le mint1 et le mint2 on paramètre la base 60 (sexagésimale) et on obtient la fonction horloge qui avance d’une unité le nombre de gauche quand on atteint 60 à droite.
Comme le montre la figure 4, on peut décider de visualiser minutes et secondes ou heures et minutes selon que le micro-interrupteur 2 est respectivement sur ON ou sur OFF.
Toujours pour le comptage automatique, il est possible de régler une valeur et faire que lorsqu’elle est atteinte la sortie de commande s’active et LD1 s’allume. Pour cela la procédure est analogue à celle précédemment décrite pour le mode compteur, sauf qu’avant de l’exécuter, il faut ouvrir (OFF) le mint4 afin de désactiver le générateur d’impulsions interne.
Quand la valeur est réglée et que l’on a pressé SW1, il faut laisser le comptage automatique se lancer de lui-même. On obtient ainsi le fonctionnement en mode “timer”. Le paramétrage qu’on vient de décrire peut servir aussi pour le décompte ou compte à rebours : dans ce cas, réglez un nombre que le compteur devra décompter jusqu’à zéro (en appliquant une tension sur la broche 8 pour déterminer la marche arrière) ; à zéro la sortie s’active.
Figure 4 : Paramétrage des micro-interrupteurs.

Même s’il s’agit effectivement d’un compteur, le montage EV8035 a quelque chose de plus, car il comporte de nombreuses fonctions :
- comptage avant : compte les impulsions appliquées à l’entrée réservée au comptage avant (UP-broche 9 SK1)
- comptage arrière (compte à rebours) : compte les impulsions appliquées à l’entrée réservée au comptage arrière (DOWN-broche 8 SK1)
- comptage automatique : compte automatiquement les impulsions produites par le “timer” interne ; le compte est en avant si l’entrée UP est alimentée avec une tension positive par rapport à la masse et à rebours si c’est l’entrée DOWN qui est alimentée - comptage jusqu’à une valeur paramétrée : que l’on compte en avant ou à rebours (selon que l’entrée UP ou l’entrée DOWN est au niveau logique haut) les impulsions produites par le temporisateur interne ou provenant de l’extérieur, le compteur s’arrête automatiquement à la valeur réglée (précédemment paramétrée) et il active la sortie correspondante - horloge : compte les impulsions reçues de l’extérieur ou produites par le temporisateur interne, mais en sexagésimal ; avec la fréquence interne, de 1 Hz, on peut obtenir le comptage en minutes et secondes ou en heure et minute.
Les modes d’utilisation dépendent du paramétrage des micro-interrupteurs du dip-switch SW5, paramétrage pour lequel on se réfèrera utilement au tableau ci-dessous :
| FONCTION | mint1 | mint2 | mint3 | mint4 |
| Compteur (à base décimale jusqu’à 9999) d’imp. reçues de l’ext., avec bref retard antirebond | OFF | NC | OFF | OFF |
| Compteur (à base décimale jusqu’à 9999) d’imp. reçues de l’ext., avec long retard antirebond | OFF | NC | ON | OFF |
| Compteur (à base décimale jusqu’à 9999) d’imp. de l’osc. interne, avec bref retard antirebond | OFF | NC | OFF | ON |
| Compteur (à base décimale jusqu’à 9999) d’imp. de l’osc. interne, avec long retard antirebond | OFF | NC | ON | ON |
| Compteur (à base 60, sexagésimale) au format h minute 23:59) avec imp. reçues de l’ext. et bref retard antirebond | ON | OFF | OFF | OFF |
| Compteur (à base 60, sexagésimale) au format h. minute 23:59) avec imp. reçues de l’ext. et long retard antirebond | ON | OFF | ON | OFF |
| Compteur (à base 60, sexagésimale) au format min. sec. (59:59) avec imp. reçues de l’ext. et bref retard antirebond | ON | ON | OFF | OFF |
| Compteur (à base 60, sexagésimale) au format min. sec. (59:59) avec imp. reçues de l’ext. et long retard antirebond | ON | ON | ON | OFF |
| Horloge au format h. minute (23:59) avec osc. int. | ON | OFF | NC | ON |
| Horloge au format min. sec. (59:59) avec osc. int. | ON | ON | NC | ON |
Notez que mint1 est celui qui est relié, à travers D3, à la broche 6 du microcontrôleur ; mint4 est le micro-interrupteur du côté opposé. Le troisième (mint3) est utilisé pour certaines applications : ouvert, il établit un retard minimum dans la détection entre deux commutations successives ; on le paramètre ainsi quand l’interrupteur, le capteur ou le circuit fournissant les impulsions à compter est précis et détermine des niveaux nets sans incertitude, donc aussi en modes comptage automatique, dans lesquels l’horloge est interne et où les inputs 8 et 9 servent seulement à lancer le compteur. Si l’on estime avoir à faire avec des interrupteurs à contacts peu précis, donnant plus d’une impulsion quand ils sont actionnés, il faut paramétrer un retard long en fermant mint3 ; c’est le cas avec un capteur de sol (dissimulé sous le revêtement) ou les pas de la personne peuvent occasionner plusieurs fermetures des contacts, ou bien avec une barrière lumineuse car, lorsqu’une personne la traverse, il peut couper le faisceau d’abord avec un bras puis avec le reste du corps (ce qui fait deux détections coup sur coup). Le choix du retard de lecture des entrées est déterminant pour la rapidité du comptage : un long retard d’antirebond limite à deux les impulsions pouvant être comptées chaque seconde, alors qu’en conditions normales (mint3 ouvert) le circuit peut compter jusqu’à 200 impulsions par seconde.
Figure 5 : Commander les entrées.
Utilisé comme compteur d’objets ou compteur de temps (en base décimale ou sexagésimale) avec commande externe, notre appareil doit être piloté par des impulsions de tension continue de 3 à 12 V, mais rien n’interdit d’appliquer aux broches 8 et 9 de SK1 des tensions alternatives : par exemple, on peut prélever un signal sur le secondaire d’un transformateur secteur 230 V, la zener le redresse en éliminant les demi ondes négatives et donne 50 impulsions par seconde (50 Hz) ; pour cela, mettre mint3 sur OFF. Si on utilise l’alternatif sinusoïdal, l’amplitude doit être comprise entre 2 et 9 Veff.
Commande avec signal alternatif périodique

Poussoirs et contacts normalement ouverts

Le compteur peut être facilement contrôlé par poussoirs ou contacts francs (relais) normalement ouverts : il suffit de les relier en série entre le point +5 V du circuit imprimé (broche 7 de SK1) et 8 ou 9, selon que l’on souhaite compter à rebours ou en avant. Ce même schéma d’application peut être utilisé, par exemple, en mode comptage automatique, en gérant par les contacts (NO) des deux relais ou simplement des interrupteurs le sens du comptage.
Compteur d’objets à micro-interrupteur
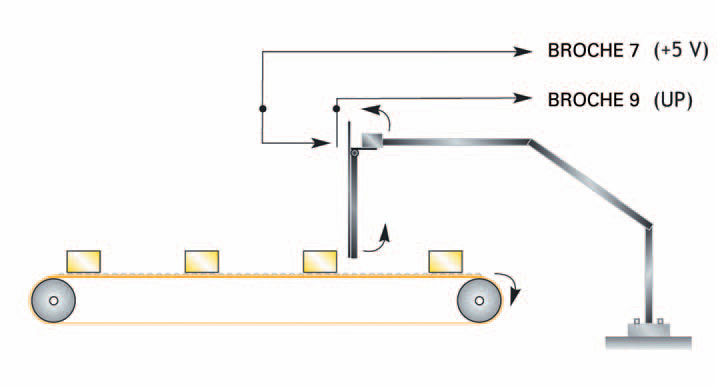
Si le capteur est un levier actionné par le déplacement des objets sur un tapis défilant (le levier comportant un micro-interrupteur), ce dernier doit être relié entre le positif 5 V (broche 7 de SK1) et l’entrée choisie (broche 9 pour le comptage en avant et broche 8 pour le compte à rebours) de manière à utiliser la tension du circuit pour les impulsions. Le micro-interrupteur doit être du type normalement ouvert, car son rôle est d’appliquer le 5 V à l’entrée du dispositif au passage de l’objet.
Tapis-contact (pédalier) avec interrupteur normalement fermé

Pour compter les personnes traversant une pièce, un hall, etc., on peut utiliser un contact plat dissimulé sous le revêtement de sol (moquette, tapis, etc.) et qui est actionné par les pas des personnes ; la tension pour commander les entrées peut être prélevée broche 7 de SK1 ou sur une source externe ; dans ce cas aussi l’interrupteur doit être normalement ouvert ; s’il est normalement fermé, il est possible de l’interfacer avec un transistor PNP qui, lorsque une personne passe, fournit un potentiel positif aux entrées du compteur. Mais rien n’empêche de recourir à une barrière lumineuse installée à un mètre de hauteur : elle devra fournir une impulsion positive chaque fois que le faisceau sera coupé par le passage d’une personne.
Commande à contact de sol (pédalier) pour entrée et sortie

Une application intéressante consiste à utiliser le dispositif pour vérifier que toutes les personnes entrées dans un local (grand magasin, exposition, salle de bal ou de cinéma, etc.) en sont bien sorties ; pour cela, il faut paramétrer le circuit afin qu’il fonctionne comme compteur à commande externe (mint4 sur OFF) en distinguant les entrées et les sorties avec des interrupteurs de sol (pédalier) ou de tourniquets, ou encore avec une barrière lumineuse. Il suffit alors de piloter l’entrée UP (broche 9 de SK1) avec le capteur utilisé pour détecter les entrées et la DOWN (broche 8) avec le capteur des sorties ; si on a réinitialisé le compteur (avec SW4) en début de journée et si le soir le compteur est encore à zéro, c’est que toutes les personnes entrées dans le local en sont bien sorties…dans le cas contraire, il faut aller chercher celles qui sont restées à l’intérieur !
Compteur d’objets avec barrière lumineuse

Si l’on entend réaliser un compteur d’objets efficace, du type de ceux utilisés avec un tapis roulant (comme on en voit aux caisses des grandes surfaces), il faut disposer d’une barrière lumineuse à LED infrarouge, à ampoule et cellule photoélectrique ou à laser, dont le récepteur fournit un potentiel entre 3 et 12 V sous un courant d’au moins 10 mA. Une bonne solution consiste à monter un circuit comparateur basé sur une simple barrière optique et doté d’un étage de sortie PNP à collecteur ouvert.
Figure 6 : Les messages d’erreur.
A chaque mise sous tension, le compteur fait un test des entrées et des poussoirs de paramétrage ; s’il découvre quelque anomalie, après avoir parcouru le déroulement logiciel contenu dans le microcontrôleur et affiché le message tESt, il fournit une des signalisations d’erreur suivantes :
Err2 = quelque chose ne va pas dans les poussoirs, c’est-à-dire que l’un d’eux ou plusieurs ont été trouvés fermés au moment du contrôle ;
Err3 = signale que les micro-interrupteurs ont été paramétrés de manière incorrecte, c’est-à-dire ne correspondant pas au tableau de la figure 4 ;
Err4 = le programme a trouvé les deux entrées actives au même moment ;
Err5 = l’entrée A (point 9) a été trouvé alimenté au moment du test ;
Err6 = l’entrée B (point 8) a été trouvé alimenté au moment du test.
Figure 7 : Le montage de la platine du compteur dans son boîtier spécifique.

Un écran de plexi rouge favorise la lecture des afficheurs à 7 segments à LED. Les poussoirs sont protégés par un film souple étanche.
La réalisation pratique
Les dimensions de la platine sont établies pour qu’elle puisse ensuite prendre place dans un boîtier spécifique (voir figure 7). Vous trouverez le dessin à l’échelle 1 du circuit imprimé simple face figure 2b.
Quand vous l’avez devant vous, montez tous les composants (en vous aidant des figures 2a et 3) en commençant par les supports du circuit intégré PIC et des quatre afficheurs à 7 segments et en terminant par les périphériques : le connecteur SK1, les quatre μpoussoirs, la LED LD1 et le dip-switch à quatre micro-interrupteurs.
Le régulateur VR1 est monté couché sans dissipateur et fixé par un petit boulon.
Attention à l’orientation des composants polarisés. Vous n’insèrerez le circuit intégré (repère-détrompeur en U vers C2) et les afficheurs (point décimal en bas à droite) dans leurs supports qu’après la dernière soudure terminée.
Procédez ensuite au montage de la platine dans le boîtier spécifique visible figure 7 (avec capot en plexi rouge) et connectez l’appareil aux entrées et aux éventuelles charges à commander au moyen du connecteur à fils colorés SK1.
A propos des sorties de commande : notre circuit fournit un courant maximal de 50 mA sous 5 V continu ; vous ne pourrez piloter “en direct” que de petites charges (relais, ampoule, LED, etc.) et des dispositifs nécessitant un signal d’entrée de type TTL.
Alimentez-le avec une petite alimentation bloc secteur 230 V fournissant de 9 à 12 V continus et débitant 300 mA (positif à la broche 2 ou 3 de SK1 et le négatif à la masse 1, 4, 6 ou 10 de SK1). Vous pouvez aussi l’alimenter en alternatif à partir du secondaire 9 + 9 VAC 300 mA d’un transformateur secteur 230 V (prise centrale du secondaire à la masse et extrémités aux broches 2 et 3 de SK1).







